Home Donate Download About Contact English
Guida in pista: La scelta della traiettoria
© 2017 Mattia Piron. All rights reserved.


SEPTEMBER 15th, 2020
Introduzione top
Uno dei fattori determinanti per migliorare il proprio tempo sul giro è l'utilizzo della traiettoria più efficace possibile. Anche un pilota in grado di portare un veicolo al limite, se sbaglia una staccata o un punto di corda, non può far segnare tempi record. La scelta della traiettoria di solito non rappresenta un problema per un pilota professionista, ma può esserlo per l'amatore. Nei corsi di guida (o nei tutorial in internet) le traiettorie sono spesso uno degli argomenti più gettonati, ma il più delle volte vengono spiegate utilizzando come esempio le curve classiche: curva a gomito, tornante e chicane. Si parla di traiettoria "classica", di punto di corda ritardato e di trail braking. Inoltre viene spiegato che, in una sequenza di curve, è meglio sacrificare la traiettoria nelle prime in modo da uscire più forte possibile nell'ultima.
Sebbene tutte queste nozioni siano corrette ed è giusto conoscerle, è difficile traslarle in un giro di pista reale. Questo perchè ogni curva di ogni circuito è unica, e la traiettoria ideale dipende sia dalle curve precedenti, che da quelle successive. Quindi, di solito cosa si fa?
Si entra in pista, percorrendo le traiettorie che riteniamo migliori sulla base della nostra esperienza, oppure copiando le traiettorie dei piloti più forti. Ma siamo davvero sicuri che quelle traiettorie siano effettivamente le migliori? Al giorno d'oggi esistono software che, dato un circuito e un veicolo, sono in grado di calcolare la traiettoria che permette di ottenere il miglior tempo sul giro. Lo stesso calcolo si può effettuare anche senza computer, e senza conoscere la matematica, vedremo più avanti come.
Simulazione al computer top
Le simulazioni vengono molto utilizzate dai team per fare il setup di base del veicolo: considerati i limiti imposti sulle ore di test e sul massimo numero di pneumatici a disposizione per ogni squadra, una simulazione al computer permette di testare un numero enorme di setup diversi senza muovere l'auto (o la moto) dal box. Tuttavia, oltre che per effettuare il setup, le simulazioni servono anche per trovare le traiettorie migliori, che il pilota poi proverà a seguire.
In termini strettamente matematici, ottimizzare la traiettoria significa trovare quella funzione che, imposti i vincoli dati dai limiti del tracciato e dal comportamento fisico del veicolo, permette di minimizzare il tempo di percorrenza. Per trovare questa funzione sono stati utilizzati e testati diversi metodi, in bibliografia sono riportati alcuni articoli sull'argomento, per chi volesse approfondire. In particolare, l'articolo "Searching for the Optimal Racing Line Using Genetic Algorithms"[1] propone un approccio molto interessante, sia per la sua implementazione (che permette di raggiungere un ottimo risultato in breve tempo) sia perché getta le basi al metodo "manuale" (o "senza computer") descritto più avanti. Anche se l'articolo è dedicato ai videogames, le simulazioni sono state effettuate utilizzando il simulatore di guida open-source Torcs. I risultati sono validi anche nel mondo reale, perché la fisica di un simulatore di guida cerca di mimare nel modo più corretto possibile quella di un veicolo reale.
In sostanza, si dice questo: la traiettoria ottimale in un dato circuito sarà un mix tra la traiettoria che minimizza la curvatura (più la curvatura è piccola, maggiore sarà la velocità media e quindi minore sarà il tempo sul giro) e quella che minimizza lo spazio percorso (se faccio meno strada potrei impiegare meno tempo). La traiettoria che minimizza la curvatura non è altro che quella che permette di "far correre" il più possibile il veicolo. Estremamente efficace specialmente con mezzi poco potenti o con un range di utilizzo del motore molto ristretto, per i quali è importante perdere meno velocità possibile e mantenere il motore sempre all'interno del suo regime ottimale.
Se chiamiamo αSP la traiettoria che minimizza lo spazio percorso e αMCP quella che minimizza la curvatura, la traiettoria migliore sarà compresa tra le due:
αBEST = αSP * ε + αMCP * (1 - ε)
Dove ε è il "peso": se ε = 0, allora la traiettoria ottima è αMCP, se è uguale a 1 è αSP, un qualsiasi valore compreso tra 0 e 1 significa che la traiettoria migliore sarà un mix tra le due. Si scopre che, in 9 su 11 circuiti testati, ε = 0. Nei due circuiti rimanenti, ε assume un valore piccolo (0.25 e 0.33), in questi la traiettoria migliore è un mix tra le due, ma è preponderante quella di minima curvatura. Considerando un giro completo di pista, si può allora dire che nella maggior parte dei casi la traiettoria migliore è quella di minor curvatura.
L'articolo poi procede suddividendo il tracciato in settori, e trovando la traiettoria migliore per ogni settore. Non si considera più un ε "totale", ma tanti ε quanti settori. Si trovano valori di ε diversi per ogni settore, e il tempo sul giro migliora. Nei tratti guidati conviene seguire la traiettoria che minimizza la curvatura, per tenere la velocità media il più alta possibile, mentre nei tratti veloci meglio percorrere meno strada. Infatti, in tutti quei tratti in cui anche a full gas si riesce a seguire la traiettoria più breve, non serve allungare la strada percorsa seguendo quella a curvatura minore.
Un metodo pratico top
Con un pò di ingegno e senza il computer, chiunque può trovare le due traiettorie limite descritte sopra. Supponiamo di avere un modello in scala della pista, in cui i limiti del tracciato siano definiti da pareti (o da chiodi, o da qualunque altra cosa). Se inseriamo uno spago in questo modello, e ne tiriamo le estremità, abbiamo trovato la traiettoria che minimizza lo spazio percorso. Infatti, mantenendo in tensione lo spago, questo si accorcia più che può.
Ora, teniamo in mente che qualunque azione in natura segue la strada a consumo energetico inferiore: come l'acqua scorre nella direzione in cui ci sono meno perdite, una trave si piega assumendo la forma che minimizza l'energia elastica. L'energia elastica di una trave dipende dalla sua curvatura: minore è la curvatura, minore l'energia elastica. Quindi, inserendo una qualsiasi trave elastica nel nostro modello di pista, questa si piegherà nella forma che minimizza la curvatura. La trave può essere un listello di legno, un piattino in acciaio... l'importante è che rimanga sempre in campo elastico: rimuovendo i limiti del tracciato, deve tornare automaticamente rettilinea.
Adesso, abbiamo un modello in scala della pista su cui correremo e le due traiettorie limite. Possiamo fotografarle, o ricopiarle in un foglio di carta, e la prossima volta che andremo in pista proveremo a seguirle. Si può iniziare seguendo la traiettoria che minimizza la curvatura e poi, giro dopo giro, "accorciare" la strada nei tratti veloci, sulla base delle nostre sensazioni di guida e del riscontro cronometrico.
Esempio per la pista di Adria top
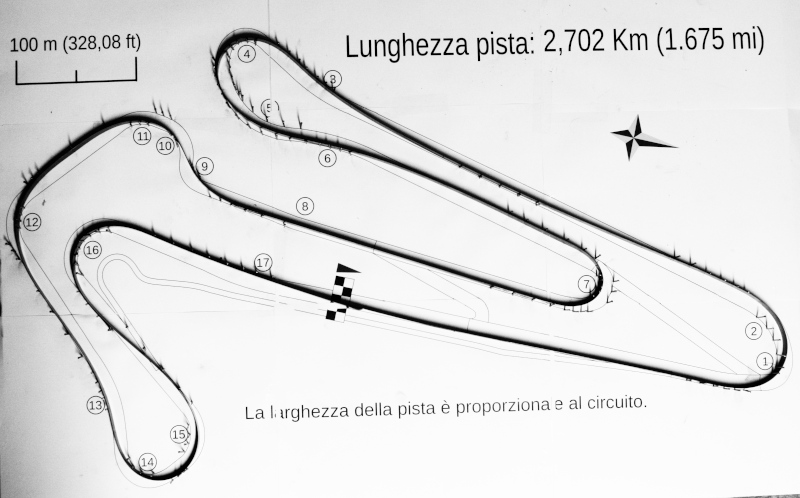
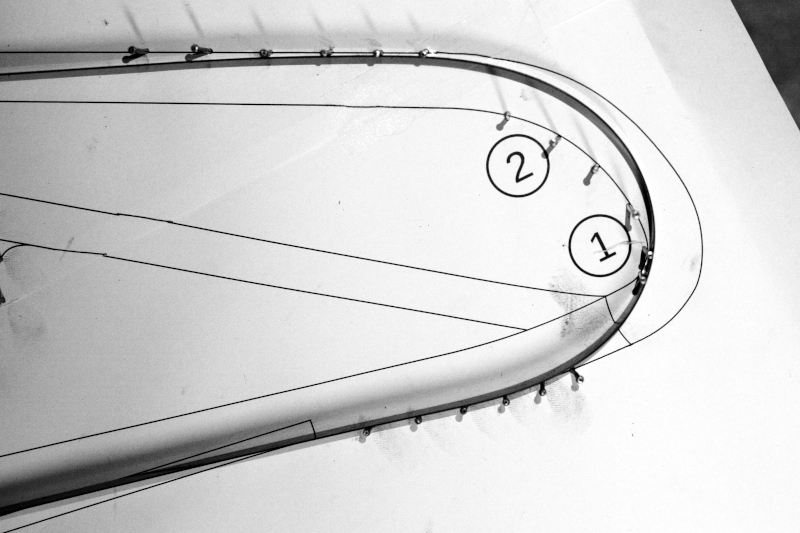
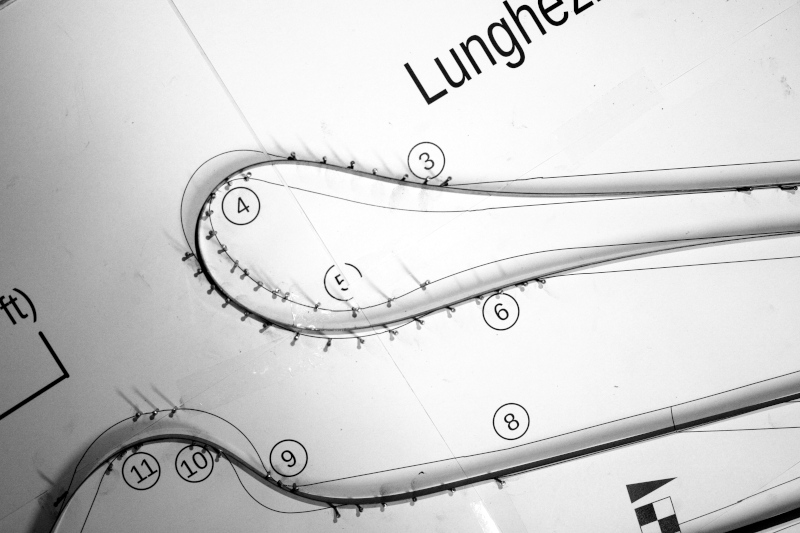
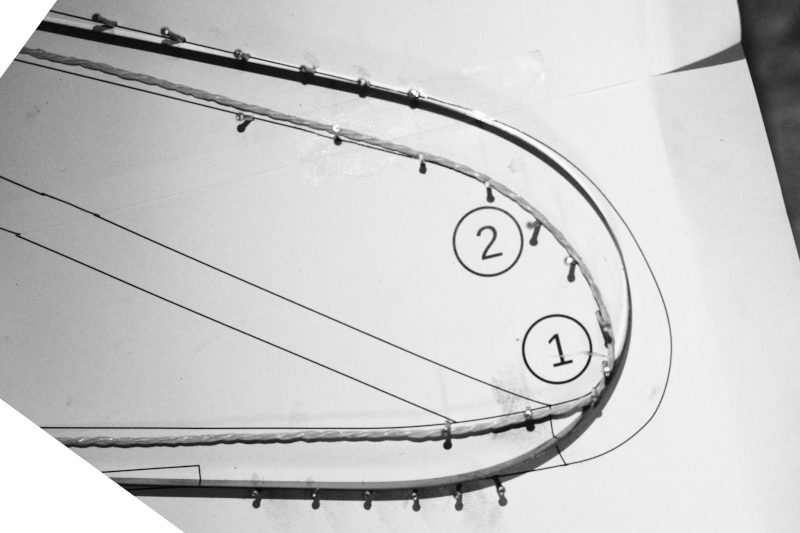
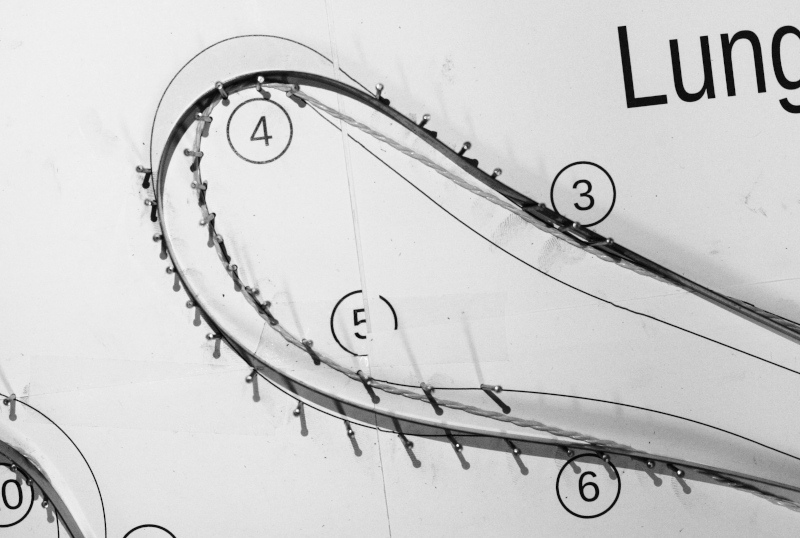
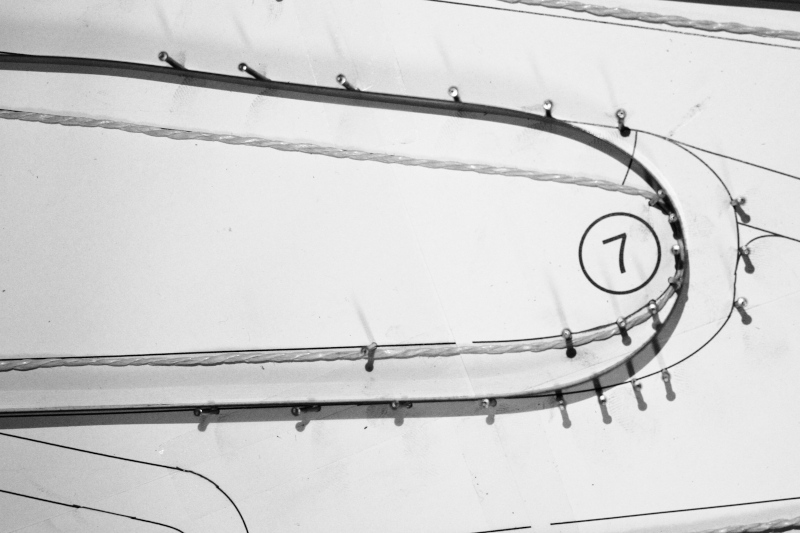
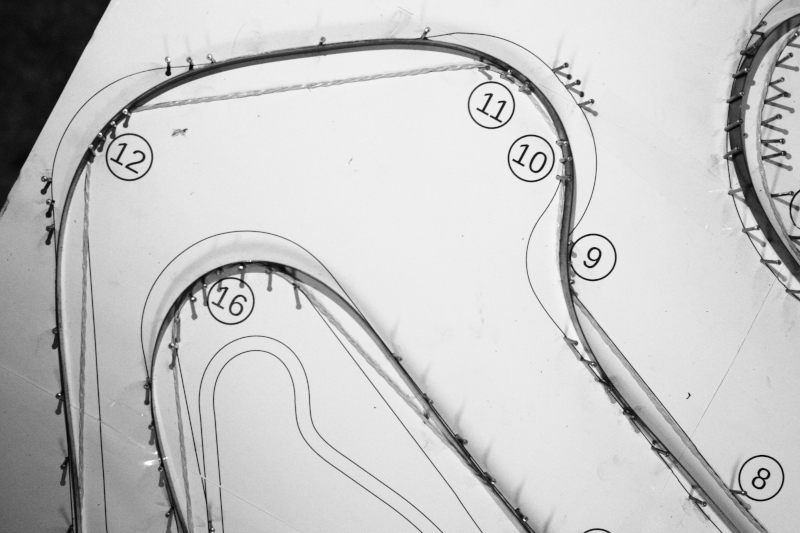
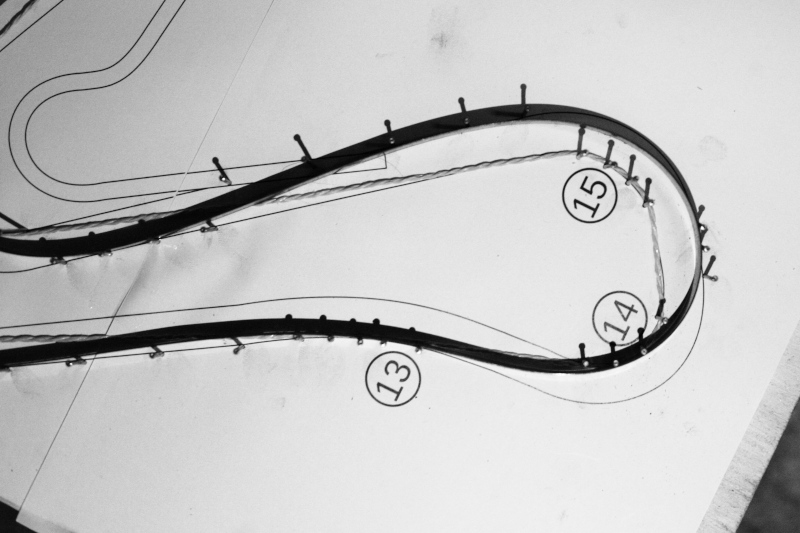
Il metodo sopra descritto viene illustrato nelle immagini seguenti, utilizzando come esempio il circuito di Adria, in provincia di Rovigo. L'immagine del circuito è stata stampata su un foglio dalle dimensioni di circa 80x55 cm, incollato su una tavola in legno, e sono stati utilizzati dei chiodini per delimitare il tracciato. Per definire la traiettoria che minimizza la curvatura si è utilizzato un nastro di acciaio armonico da 15x0.5mm, morbido abbastanza da poter seguire anche le curve più strette, ma sufficientemente elastico da non subire deformazioni permanenti. Inoltre, poteva scivolare sui chiodini, adattandosi nella maniera più ottimale alle curve del circuito.
Per definire la traiettoria di minor distanza è stata utilizzata della comune gavetta tirata alle estremità.
Vista generale del circuito
Traiettoria che minimizza la curvatura

Traiettoria che minimizza la distanza
Ingrandimento curve, traiettoria che minimizza la curvatura

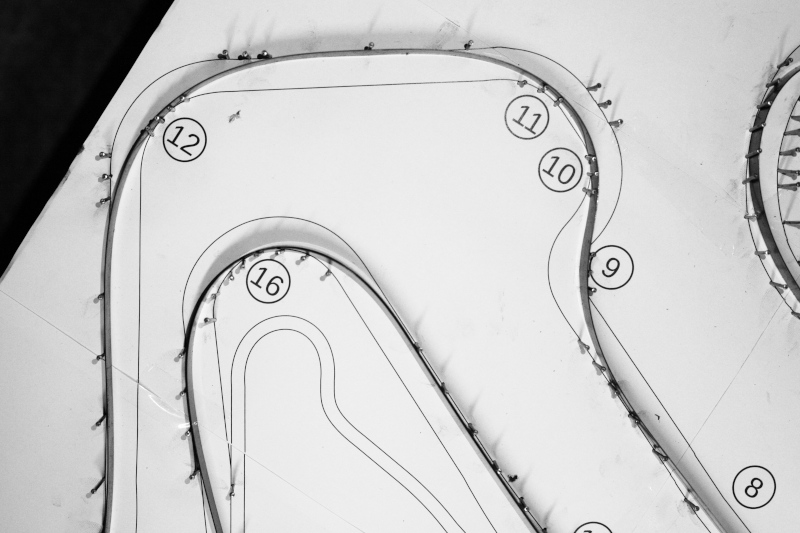
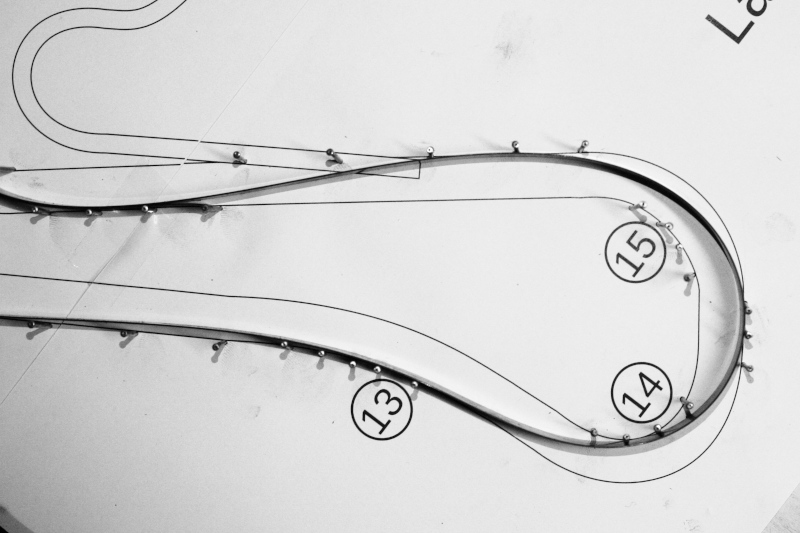
Ingrandimento curve, confronto traiettorie
Bibliografia top
- Searching for the Optimal Racing Line Using Genetic Algorithms, Luigi Cardamone, Daniele Loiacono, Pier Luca Lanzi, Alessandro Pietro Bardelli, Conference Paper, September 2010
- An Efficient Minimum-Time Trajectory Generation Strategy for Two-Track Car Vehicles, Alessandro Rucco, Giuseppe Notarstefano, John Hauser, IEEE Transactions on Control Systems Technology, February 2015
- A Curvilinear Abscissa Approach for the Lap Time Optimization of Racing Vehicles, R. Lot, F. Biral, Article, 2014
- A Sequential Two-Step Algorithm for Fast Generation of Vehicle Racing Trajectories, Nitin R. Kapania, John Subosits, J. Christian Gerdes, Stanford University, 2016
- Computing the racing line using Bayesian optimization, Achin Jain, Manfred Morari, 2020
- Racing Line Optimization, Ying Xiong, Shanghai Jiao Tong University, 2010
- Lap Time Simulation for Racing Car Design, Blake Siegler, 2002
Help me help you top
Devi sapere che ho creato questo sito web per passione e per amore della divulgazione. Se vuoi aiutarmi a mantenere e far crescere queste pagine, puoi fare anche tu una piccola donazione. Grazie di cuore.